Object Recognition Kitchen 透明物體辨識(演算法概念)
前言
這次的文章想要討論一個有趣的題目 – 透明物體辨識,這次的介紹先把題目限定在找出透明物體的位置,並把透明物體的輪廓找出來。
演算法功能簡介
我們的演算法目的是要找出影像中的透明物體,並把輪廓圈出來,就像下面這張圖一樣。
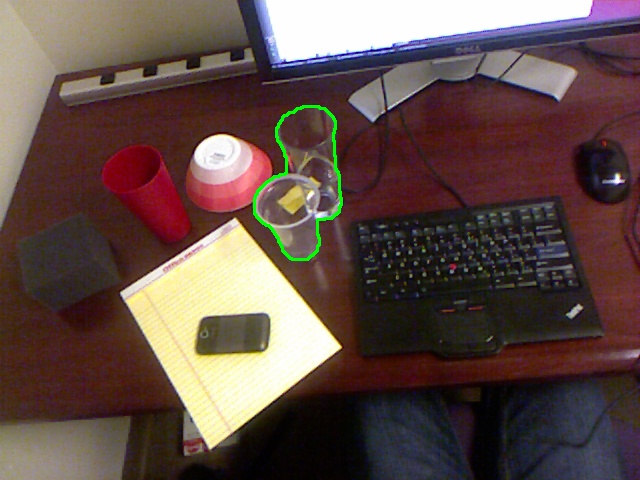
其實如果要更精確,應該把想要辨識哪些透明物體、在那些場景、辨識成功率希望有多高、如何定義辨識成功等都說清楚,不過這邊想先帶給大家一個初步的概念,就不討論得太過瑣碎。
演算法概念
為了達成這個功能,我們勢必要先收到彩色影像,所以肯定需要一台相機。不過下一個問題是,我們只需要用彩色影像資訊就能夠抓到透明物體的輪廓嗎? 還是我們需要其他的資訊 (也就是要不要考慮使用其他的 sensor) ?
要回答上面的問題,首先要來想想這個問題會什麼會困難。直覺上應該很容易發現,透明物體的顏色會隨著背景顏色不同而變,所以一般用顏色、紋理特徵來辨識的演算法都不太適用;此外,因為透明物體的邊界常常是模糊不清的,所以跟旁邊的物體很容易混在一起,造成輪廓抓錯。所以核心的問題就是,除了顏色、邊緣這些常用的特徵,我們還可以用什麼資訊來抓透明物體? 有一篇論文提出一個滿有趣的做法,他是使用 Kinect 的深度資訊,而且利用透明物體在 Kinect 的深度圖裡面會有破洞的特性,當成一個辨識的起點:


這個概念主要來自這篇論文 – Recognition and Pose Estimation of Rigid Transparent Objects with a Kinect Sensor,他提出的做法是,利用深度圖裡面有大塊破洞的位置,猜測這塊位置是透明物體,接著再根據這個線索找出透明物體的輪廓。
所以下一個問題就是,怎麼根據這個粗略的位置,把透明物體的輪廓切出來,論文中使用的方法是 Grabcut 演算法,這個演算法需要先有一個初始的前景跟背景線段,然後根據這個線段區分出前景跟背景,例如在下圖中,紅色線段是前景、藍色線段是背景,接著 Grabcut 演算法會根據顏色的近似程度還有距離關係,算出綠色框框內那些是前景、哪些是背景,然後把前景切出來。
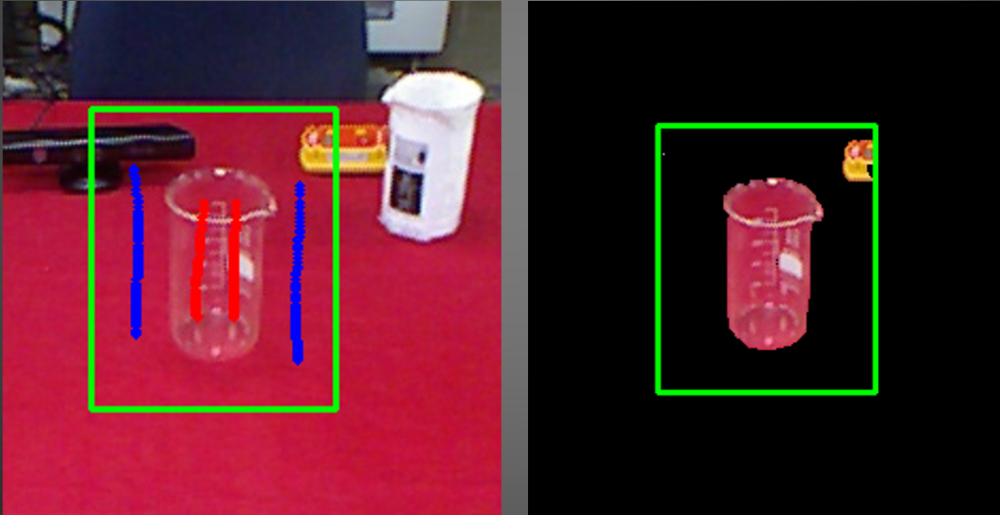
切出來之後,目的就算是達成了!當然後續還有很多問題待討論(例如背景的複雜度、怎麼對深度影像中的破碎點做一些基本的處理等),不過今天先把範圍限縮在最上層的概念。
總結
演算法的應用真的是千奇百怪,但不管是簡單的演算法題目還是困難的演算法題目,解決的方法都是要看出問題的本質,然後再根據這個問題的特性去使用特定的步驟來解決。像這個範例就是巧妙地利用 Kinect 特性來處理透明物體的特徵很難抓的這個問題,畢竟會在 Kinect 的深度圖中固定呈現出破洞也算是一種特徵,至於更詳細的演算法流程或是程式碼的部分,就留待未來再介紹囉!
延伸閱讀
演算法介紹投影片
ORK 的 transparent object recognition page
關於作者:
@pojenlai 演算法工程師,對機器人跟電腦視覺有少許研究,最近在鍛鍊自己的執行力
留言討論